消除机器人示教作业 如何使用接触式探头

近年来,协作机器人及多轴机器人不仅要求能够从事搬运等简单作业,还要求可以完成切割、焊接等更复杂的作业。
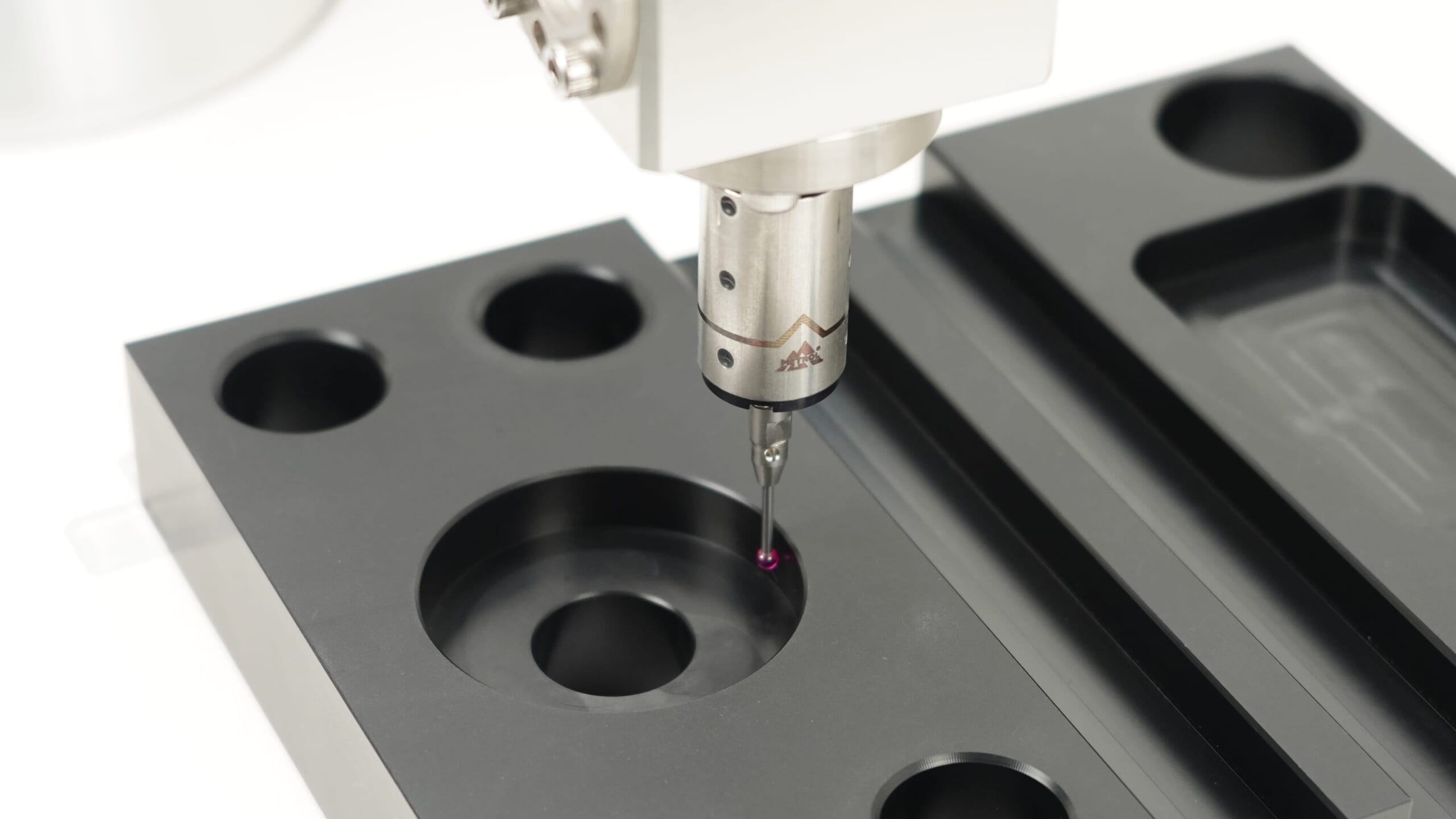
美德龙的机器人用3维接触式探头【K3M系列】历经20多年被各种工业机器人、机床、机器人系统集成商所采用。
“将接触式探头搭载到机器人上如何使用?”本文将会对这些问题给出答案。
- 了解机器人用接触式探头K3M系列的特点
- 可知引进机器人的课题“示教作业”自动化的系统
※本文介绍的系统与机器人系统集成商高丸工业株式会社协作。
目次
机器人用接触式探头“K3M系列”的特征
首先介绍接触式探头K3M
接触式探头的主要用途
- 检测工件的加工位置
- 确认工件的孔位置、深度
- 工件的位置补偿
- 测量加工后的内径、外形、平行度等尺寸
接触式探头K3M系列的特征
- 利用机器人×探头自动定位加工前的工件。
- 即使使用速度很快的“高速接触”也可以检测,不会降低作业效率。
- 可根据搭载设备及安装场所进行定制
引进接触式探头的机器人、机床
- 焊接、多轴机器人
- 激光/等离子切割机
- 协作机器人(通用机器人)
- CNC磨床

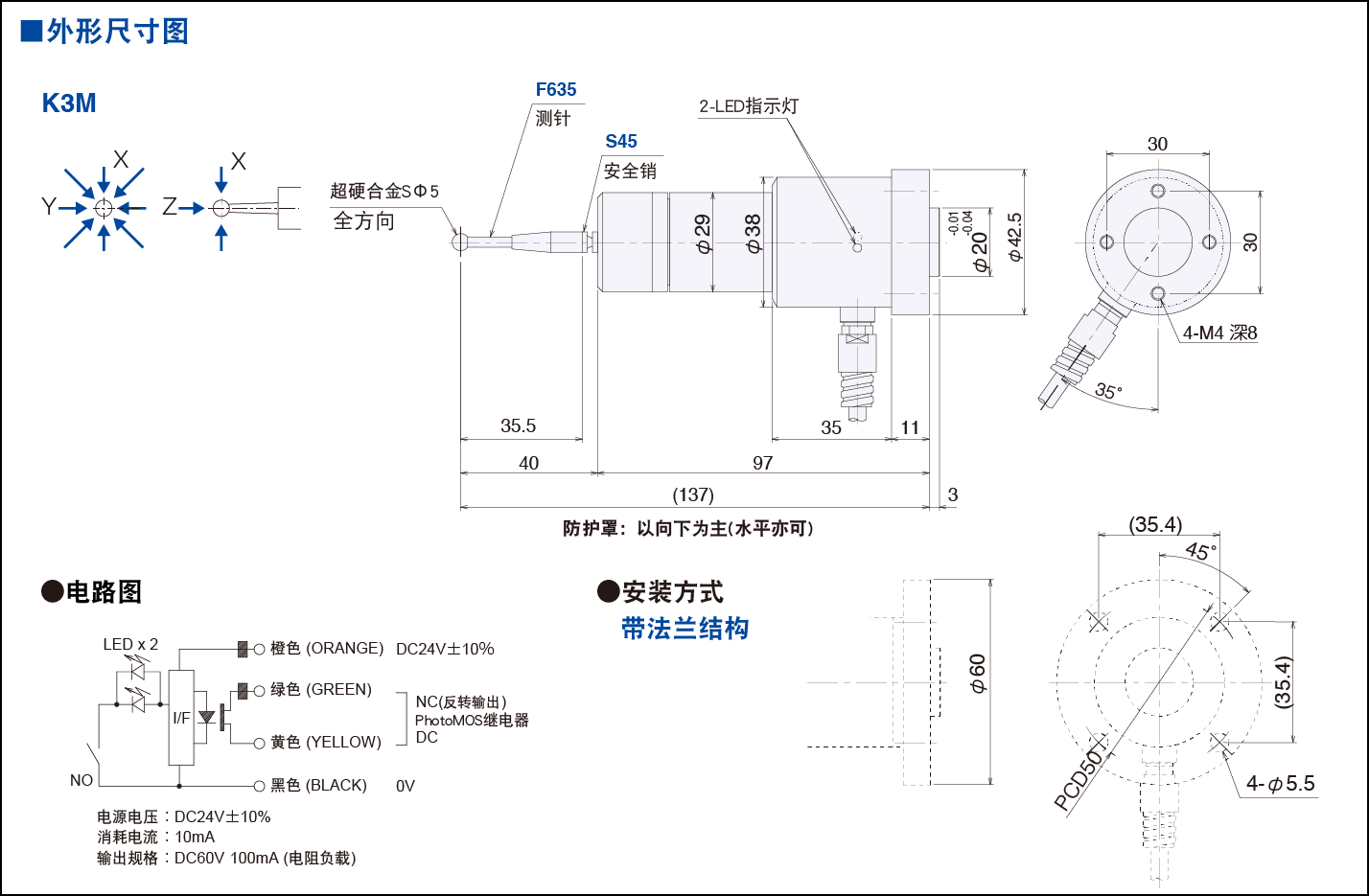
| 接点构造 | NO(常开) |
|---|---|
| 动作点的重复精度 | 0.01 - 0.03mm(取决于操作速度) |
| 保护构造 | IP67 |
| 接点额定值 | DC5V〜DC24V 稳态电流10mA以下(冲击电流20mA以下) |
如何将接触式探头搭载到机器人?
关于接触式探头的加装及搭载,美德龙可为您介绍系统集成商。
欢迎随时咨询。
引进机器人实现自动化的任务是什么?
“希望让生产线24小时运转”
“希望消除人工偏差,实现作业标准化”
“希望实现危险作业自动化,减少使用、运用成本”
“希望让作业人员专注于附加值更高的作业”
近年,劳动者的确保变得越来越困难,这些作业的危险及负担大,“希望能将作业由人过渡到机器人”的需求进一步增加。引进多轴工业机器人替代人工的情况越来越多。
引进案例包括有以下作业。
【机器人的引进目的】
- 搬运作业
- 焊接作业
- 切割、钻孔作业
- 涂胶
- 涂装作业
机器人引进时的课题?接触式探头的作用。
“无法编写机器人的工作程序,示教人员(示教作业人员)不足”
引进机器人需要进行“示教作业”,让机器人记住作业的动作。
示教作业是一项需要专业知识的高难度工作,也是引进机器人的一道门槛。
如果是简单作业,通过直接示教就能让机器人记住动作,但如果是“定位加工点”“传感动作”等高级示教,就需要委托给外部,从而会产生很高的成本。
能否使此类高难度的示教作业实现省人化、减少工时呢?
【目的】希望通过机器人实现作业自动化
【需求】希望将示教作业的工时降到最低
【课题】需要编写实现自动化的复杂程序
内部自制的课题:没有示教人员,培训时间长
委托外部的课题:引进成本、运用成本高
运用接触式探头而无需机器人示教的系统是什么?
对于示教这个课题
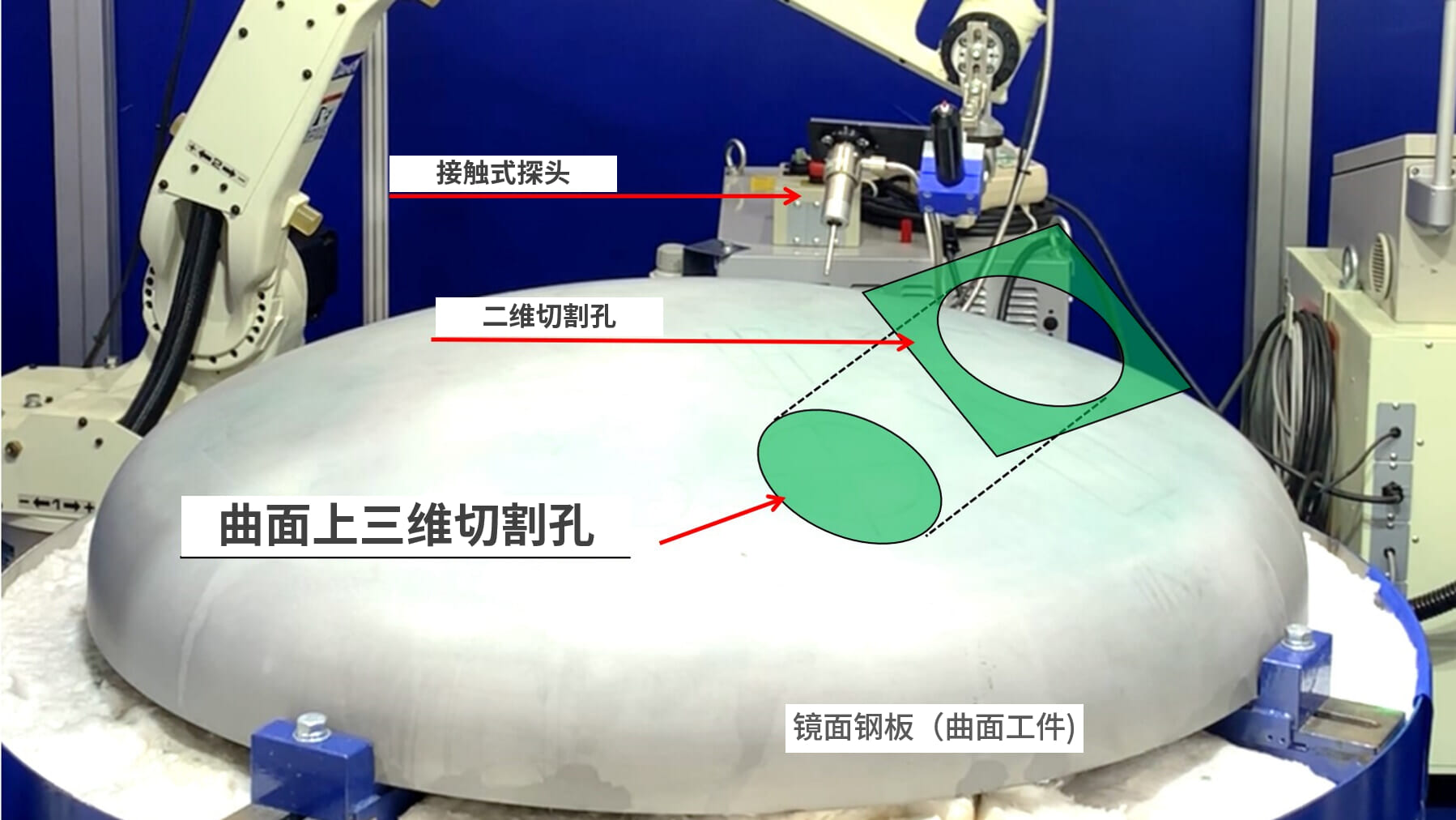
下面就以“镜面钢板(曲面工件)切割”为例介绍不进行示教就能让机器人记住动作的方法。
以往的示教编程中的课题
由机器人系统集成商高丸工业开发的示教系统不需要进行任何
“ 3维曲面工件钻孔作业”示教,就会自动编写、执行动作程序。
重点是组合使用焊接机器人和接触式探头来获取3维信息。

以前,如果在曲面上钻孔,要按步骤1、2进行作业。
步骤1:人工在工件的三维局部上对要切割的孔进行划线,再进行焊接、切割
步骤2:用三维CAD制作加工工件的数据,编程后用机器人进行焊接、切割
然而,以往的步骤存在3个问题
- 由于是小批量多品种的工件,难以模式化
- 用CAD绘制的工件图纸和实物尺寸有误差
- 需要复杂程序才能按照3D CAD图纸运行机器人
解决问题的“无示教系统”是什么?
高丸工业的无示教系统只需输入二维(平面)的尺寸数据,就能实现划线作业以及切割曲面工件的作业。
无需进行任何示教作业。
从结论可知
首先用接触式探头检测要在工件曲面上切割的孔的“高度坐标”。
使用预先输入的切割孔的二维信息和探头的高度信息,可自动生成并执行三维钻孔加工程序。
下一章将看着视频具体讲解。
【视频】使用接触式探头的简单示教系统讲解
下面以“利用机器人在三维曲面上进行钻孔作业”的视频为例,讲解无需编程的无示教系统。
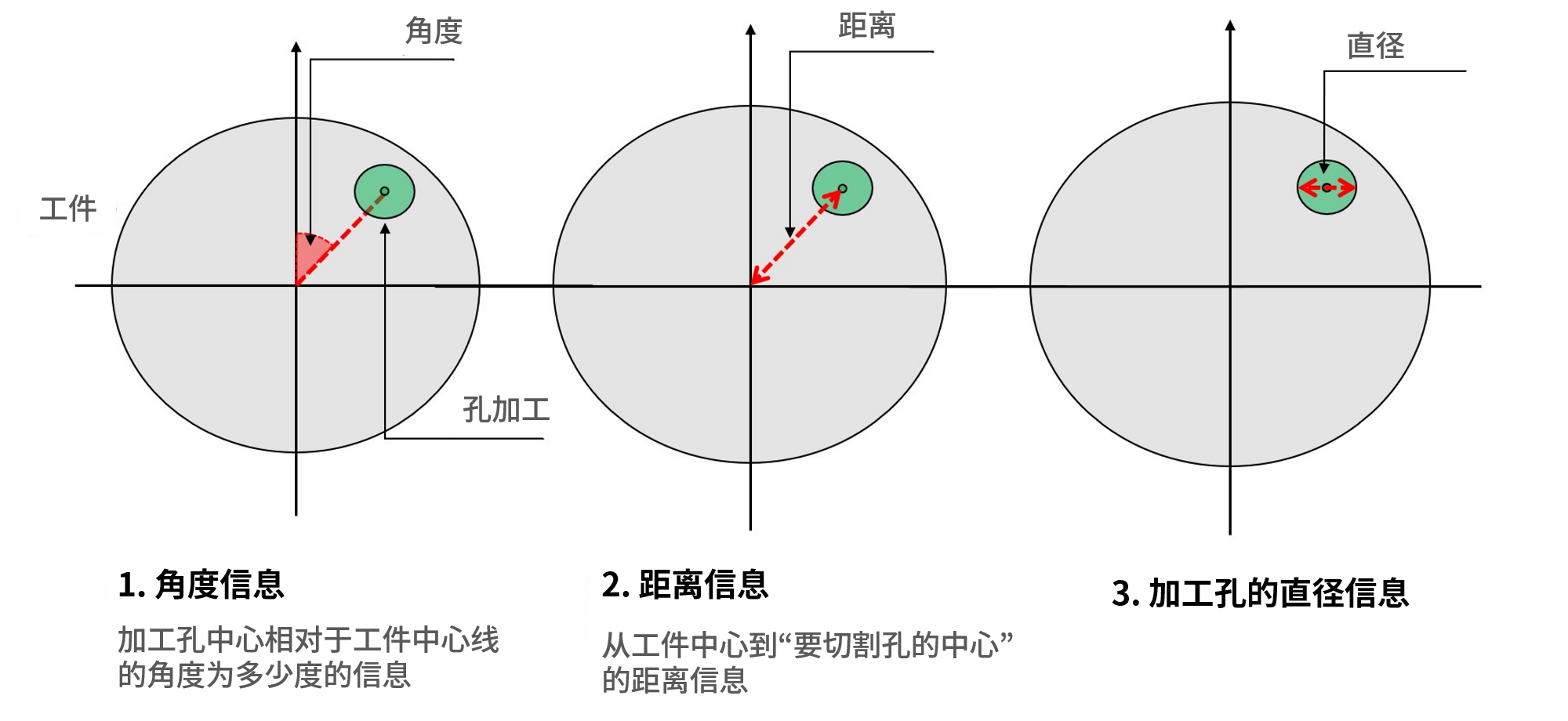
步骤1:输入加工孔的平面信息
はじめに、3つ首先输入3个信息,确认二维孔的切割位置和大小。
1. 输入“角度信息”
加工孔中心相对于工件中心线的角度为多少度的信息
2. 输入“距离信息”
从工件中心到“要切割孔的中心”的距离信息
3. 输入“加工孔的直径信息”
要切割的孔的直径信息
步骤2:获取高度信息
步骤1已输入平面的2维信息,但实际的孔并不是平面,而是位于工件的三维曲面上。
也就是说,机器人要加工孔,还必须要取得“高度信息”,并编写三维的动作程序。
步骤2,用接触式探头接触曲面进行检测,取得加工孔的“高度坐标”。
【视频讲解:动作顺序】
- 转台根据已输入的“角度信息”旋转
- 用接触式探头检测镜面的高度信息⇒检测要切割的孔的中心
- 用传感器测量圆通过的圆周上的5处高度信息
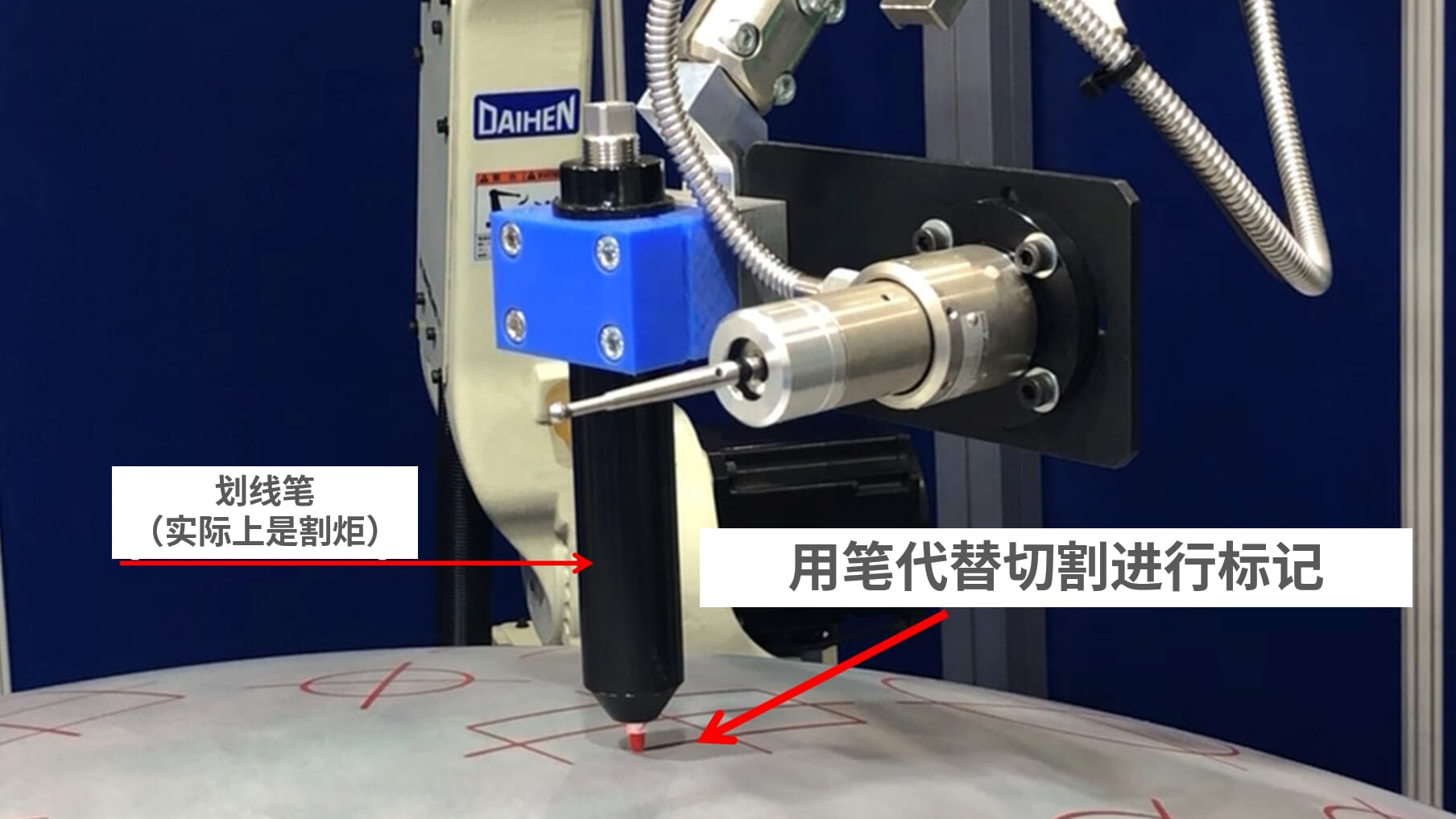
- 根据③测量的信息计算中心线,然后实际划(十字)线
- 用传感器测量9处圆的轨道高度
在1-5的工序中完成获取平面圆在三维上通过的坐标(高度)信息。
步骤3:切割加工孔
机器人将切割孔改编成三维形状作业,然后再由机器人执行作业。
在三维曲面切割改编后的孔。(划有红色标记的位置)
通用机器人的接触式探头
介绍近年来在垂直多关节机器人中越来越多引进的“协作机器人”中的应用案例。
在UNIVERSALROBOTS(通用机器人)公司的协作机器人中搭载接触式探头。

可代替人工进行简易的检查作业(测量内径、外径、高度)。
机器人用接触式探头的资料下载
有关资料、产品目录,请在填写该表格中后下载。
本文中介绍的产品
![超小型有线接触式探头 [K3S系列]](http://metrol-sh.cn/wp-content/uploads/2021/08/img_touch-probe_800x800-400x400.jpg)
超小型有线接触式探头 [K3S系列]
节省空间的工件自动发端
![有线接触式探头 [K3M系列]](http://metrol-sh.cn/wp-content/uploads/2021/02/img_touch-probe-k3m_1-400x400.jpg)
有线接触式探头 [K3M系列]
[工业机器人用 ] 安装在机械臂或焊接机器人上,用于工件的尺寸测量、定心、定位。
机器人用接触式探头相关咨询
由本公司工程师为您回答有关接触式探头使用方法的提问及定制要求。如果明确用途、使用环境、检测工件等,可为您提出具体方案。
请通过以下咨询表联系我们。