【保存版】定位接触式传感器的选型及术语详细讲解!
目次
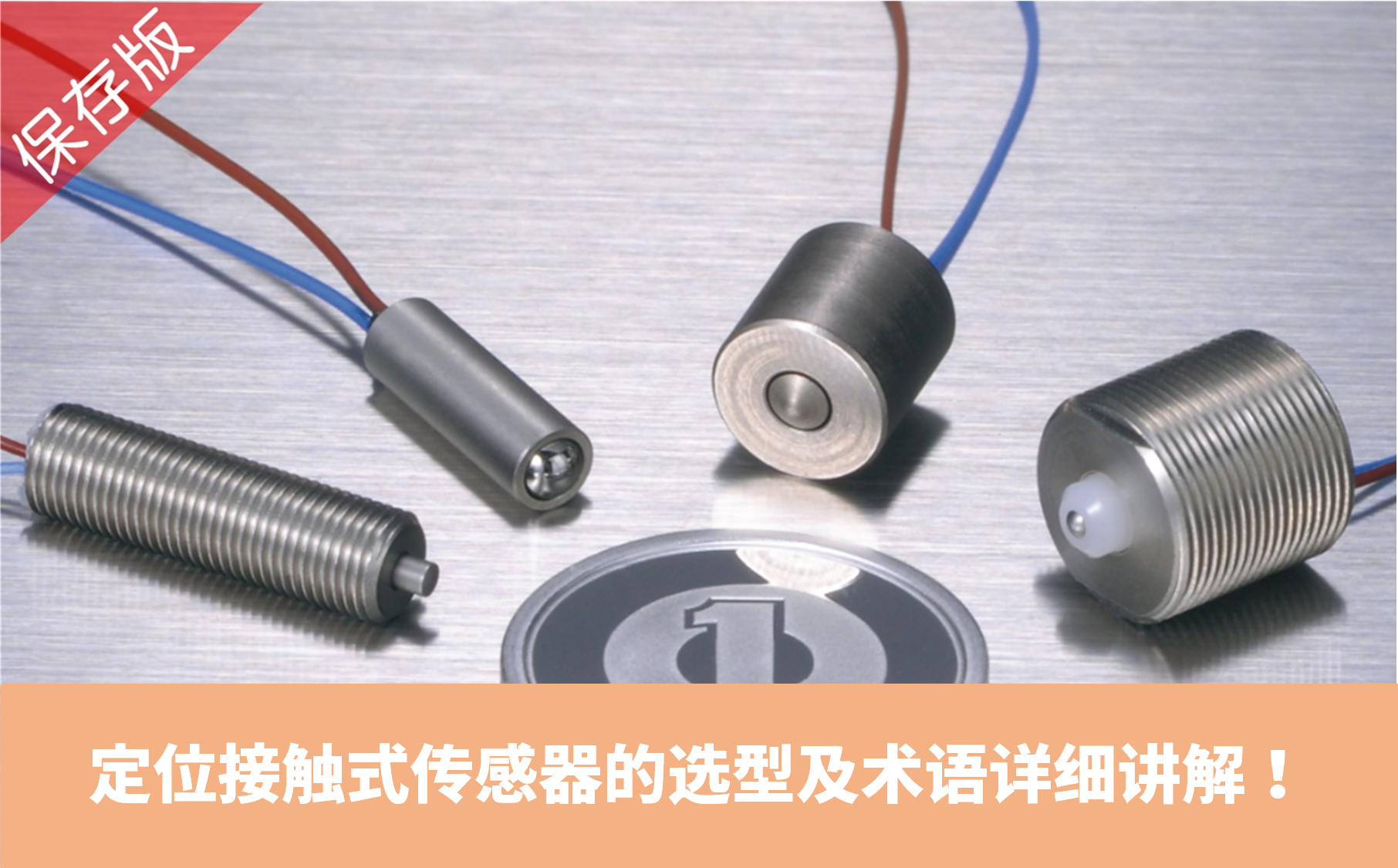
什么是定位接触式传感器
“定位接触式传感器”是一种通过接触被检测体,输出ON/OFF信号的接触式传感器。
最常用于被检测体的就位确认及定位。
尽管它的用途和限位开关及微动开关相似,但精度、耐久性方面却大不相同。
因此,接触式传感器不仅可安装到机器人,而且在机床等的恶劣环境下也能安装。
其在机床中能够起到正常把握刀具及工件位置的作用,有助于高精度加工及减少不良品。
ス根据传感器的种类不同,动作方法、动作位置、动作的移动、动作所需的力各不相同。
本文将就有助于接触式传感器选型的基本构造和术语进行讲解。
定位接触式传感器的使用案例(演示视频)
首先请大家看一下定位接触式传感器使用案例的视频(3分20秒)。
视频中介绍了安装有定位接触式传感器的“工件搬运机器人”。
“工件搬运机器人”使用传感器完成以下工作。
- 夹紧工件、就位确认
- 夹具定位
- 确认工作台的位置
关于接触式传感器的规格
动作形态 (NO和NC)
接点输出的信号形式有常开(NO)和常闭(NC)2种。
《常开》
《常闭》
轴承 (金属轴承与滚珠轴承)
有“金属轴承”和“滚珠轴承”2种。
可选择的轴承类型根据被检测体的接触方式而不同。
《直进接触用》
被检测体笔直压入轴时,可选择“金属轴承”和“滚珠轴承”中的任意一种。
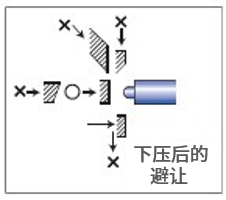
《偏角接触用》
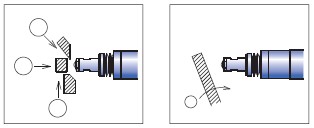
如果在压入触头时会向轴施加斜向力,请选择“滚珠轴承”。
什么是触头 (球型和平面型)
“触头”是传感器前端接触被检测体的部分。也称为“测头”。
在压入触头时,通过内部接点部相互间的接触或分离进行通电,输出信号。
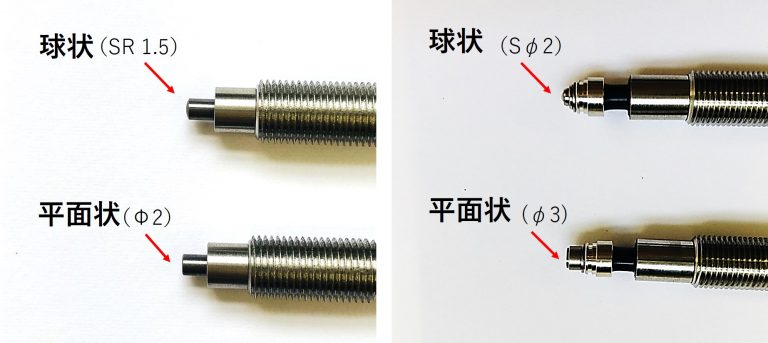
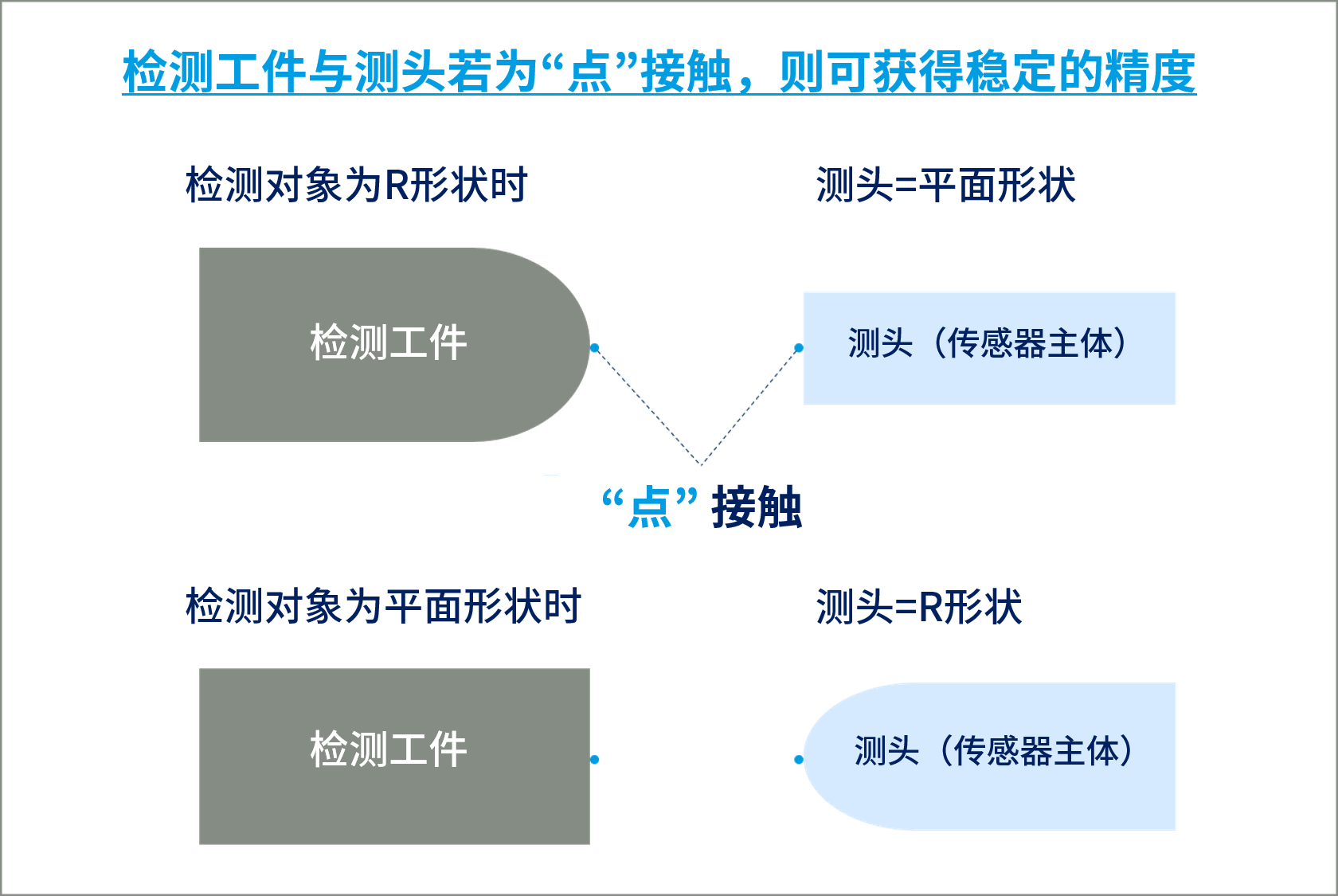
触头的形状大致可选择“球”和“平面”。
根据检测对象的形状分别选择,可保持精度稳定。
●球型
被检测体的形状为平面状时,请选择“球状”。
●平面型
被检测体的形状为球状、凸状或R形状时,请选择“平面状”触头。
防水结构(IP保护等级)
“IP保持等级”指防尘和防水性的等级。
美德龙的高精度接触式传感器等众多产品都具有IP67高防水性。
因此,即使在冷却液及切屑飞溅的机床的恶劣环境下也可使用。
更多有关防水规格的内容,请点击这里


接触式传感器术语一览表
在选择定位接触式传感器时,不能忽略以下条件。
- 触头压入多少才会动作?
- 什么时候切换(复位)信号?
- 需要施加多大的负荷?
下面是选型所需术语的汇总一览表。
| 分类 | 术语 | 单位 | 定义 |
| 位置 |
自由位置 |
mm | 没有对触头施加任何力时的触头位置。 |
| 动作位置 | mm | 压入触头时切换信号的位置。 | |
| 返回位置 | mm | 切换后的信号复位的位置,从动作位置返回自由位置的点。 | |
| 动作极限位置 | mm | 将触头压到底,无法进一步压入的位置。 | |
| 动作 |
行程 |
mm | 触头可移动的最大安全距离 |
| 预行程 | mm | 动作之前的移动。 | |
| 超程 | mm | 切换信号后可压入的量。行程减去预行程的距离。 | |
| 力 | 接触力 | N | 切换信号所需的力。 |
| 返回力 | N | 从动作极限位置移动到返回位置所需的力(弹簧力)。 | |
| 精度 | 重复精度 | mm | 信号动作点位置的偏差的最大值。 |
| 迟滞、滞后 | mm | 从传感器的动作点到信号复位点的距离之差。 | |
| 温度漂移 | mm | 因环境温度变化而引起的信号动作点波动范围。 |
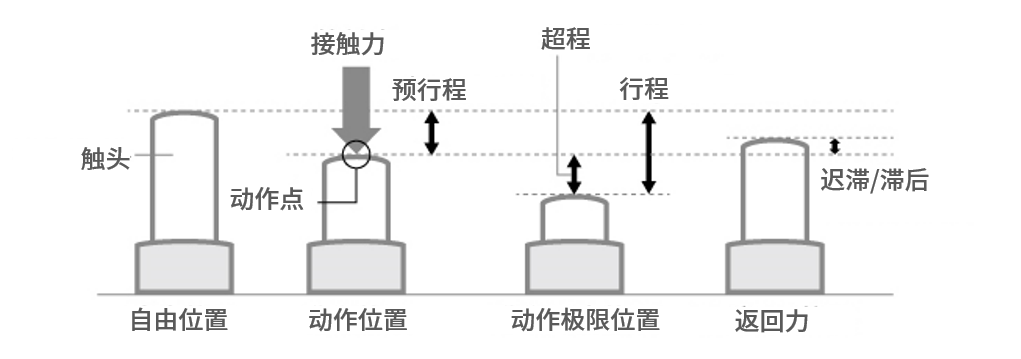
【术语讲解】定位接触式传感器的构造
信号切换位置
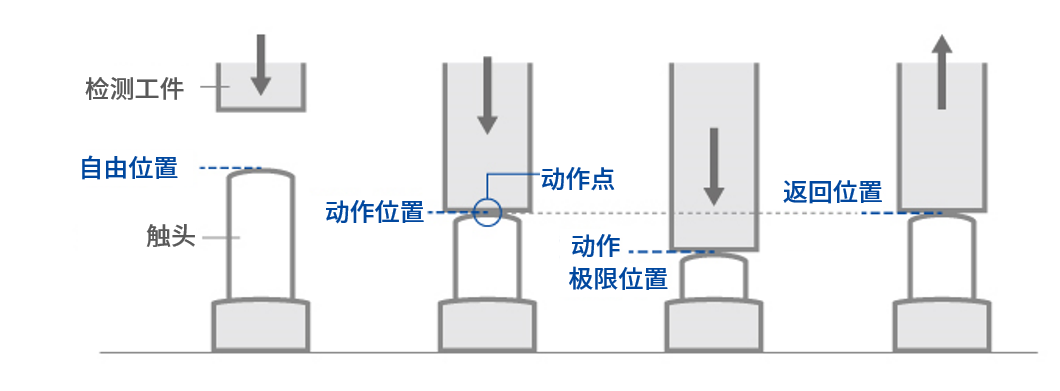
●自由位置
没有对触头施加任何力时的触头位置。
●动作位置
压入触头时切换信号的位置。
●动作极限位置
将触头压到底,无法进一步压入的位置。
● 返回位置
切换后的信号复位的位置,从动作位置返回自由位置的点。
美德龙传感器的动作位置=返回位置,没有迟滞。
▼接触式传感器的动作
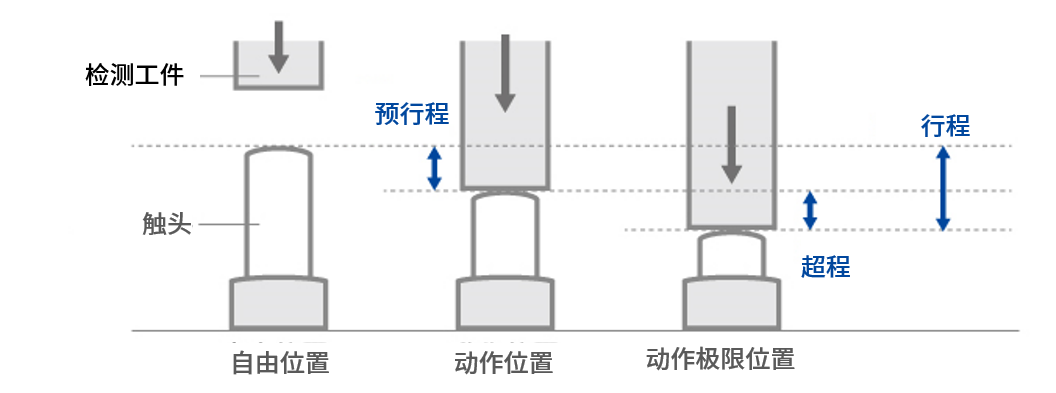
● 行程
“整体的移动”。
可压入触头的最大量(mm),从自由位置到动作极限位置的移动距离。
● 预行程
在信号切换之前压入触头的量。
从自由位置移动到动作点的距离,也称为“间隙”。
常开(NO)型必须有预行程。
常闭(NC)型有些型号不带预行程。
如有预行程,需要压入预行程的量直至切换信号。
防止因振动或冲击,使用重触头而造成的误反应。
而如果没有预行程,在压入触头时就会立即切换信号。
由于压入量微小,可以减少对被检测体施加的负荷。
● 超程
从切换信号的位置开始可进一步压入的量。
行程减去预行程的距离。
超程越大,越能防止被检测体碰坏传感器的故障。
带有超程信号的传感器。
超程信号是防止过度压入触头的信号。
使接触式传感器动作的力
● 接触力
将触头压入到信号切换位置所需的力(单位 N)。
接触力随着触头的压入量变大。
使用重触头时,请注意以下几点。
・水平使用垂直安装时:
仅是活动部的重量,就会使接触力变大。
・垂直使用水平安装时:
仅是活动部的重量,就会使接触力变小。请注意返回不良。
● 返回力
从动作极限位置移动到返回位置所需的力。
本公司的定位接触式传感器利用内部的弹簧力返回,无需施加外力。
【术语讲解】接触式传感器的精度
重复精度
信号动作点位置的偏差的最大值。
以范围(R)表示被检测体垂直接触触头,并连续按压30次时,动作位置偏差的最大值与最小值之差。(本公司定义)
美德龙的定位接触式传感器的重复精度高,信号动作点的偏差小,可判别容许公差范围小的被检测体OK/NG。
◆有关本公司重复精度、精度检查的情况请点击这里
迟滞/滞后
动作位置和返回位置的距离之差。
美德龙的接触式接点型传感器没有迟滞。
也就是说,动作位置和返回位置相同。没有迟滞,可检测工件的微小动作。
而电气传感器(限位开关及微动开关、接近传感器或光传感器等)会发生迟滞。
迟滞内为死区,无法检测,不适于检测工件的微小动作。
动作位置和返回位置的偏离除了传感器本身的原因之外,还有托架(固定传感器的支柱)因接触力发生弯曲的原因。
接触力较大的型号请注意托架的刚性。
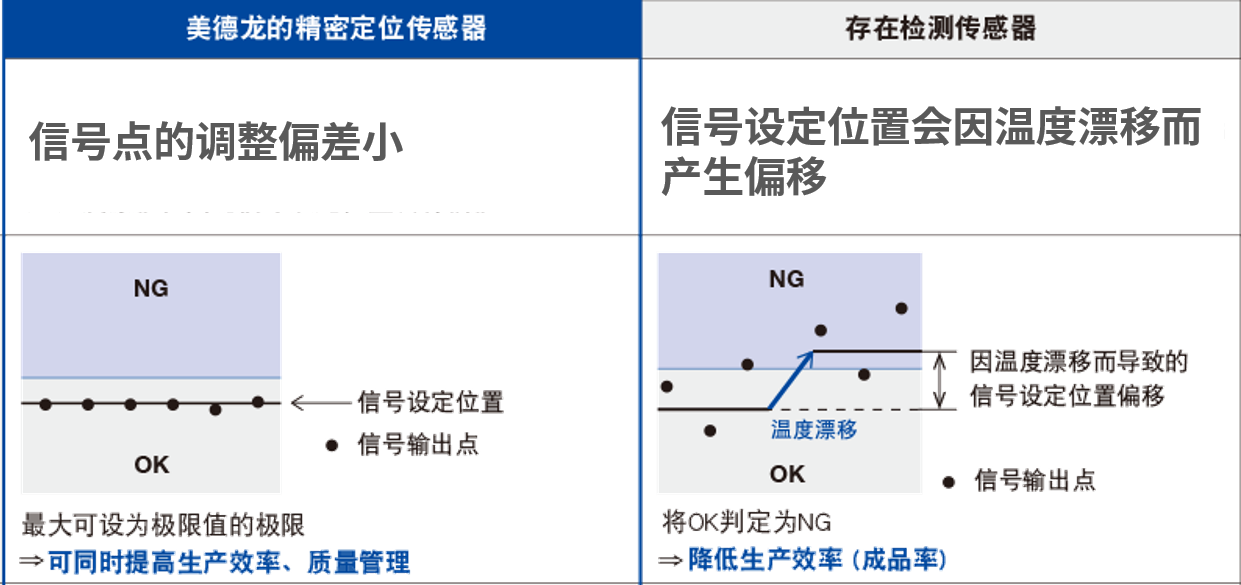
温度漂移
传感器的温度发生变化时,内部的部件就会伸缩,动作点发生偏移。
美德龙的定位接触式传感器本身没有温度漂移。
由于没有使用电子零件,因此没有热源,结构简单。
温度漂移主要发生在使用放大器的传感器上。
以上就是定位接触式传感器的基本构造和选型时的术语讲解。

咨询表
如果您对 "定位接触式传感器 "的选择或使用有任何疑问,请通过以下表格与我们联系。
我们的技术人员会给您答复。